Präzisionsmaschinen für Auswuchttechnik und Rotorenoptimierung
Wir bringen Ihre Rotoren ins Gleichgewicht: Ihr Experte für Auswuchtmaschinen, Messtechnik und High-Speed-Lösungen
Ob Handmaschine, Serienmaschine oder High-Speed-Sonderlösung: Wir bringen alles ins perfekte Gleichgewicht. Mit unserer Präzisionstechnik reduzieren wir Schwingungen und verlängern die Lebensdauer Ihrer Anlagen. Maßgeschneiderte Lösungen für jede Herausforderung warten auf Sie.
Hofmann. - Ihr Partner für präzises Auswuchten, Messen und Schleudern
Bei Hofmann verbinden wir langjährige Erfahrung mit modernster Technologie, um Rotoren, Maschinen und Anlagen perfekt auszubalancieren. Ob Handmaschinen, Serienlösungen oder High Speed Sondermaschinen, wir liefern präzise Auswuchtmaschinen, leistungsstarke Messtechnik und innovative Schleuderlösungen.
Unsere Lösungen sind exakt auf Ihre Anforderungen zugeschnitten. Von der Idee bis zur Inbetriebnahme begleiten wir Sie umfassend. Modernste Messverfahren, detaillierte Analysen und intelligente Automatisierung machen Ihre Prozesse sicherer und effizienter.
Mit unserem erfahrenen Team, individueller Beratung und zuverlässigem Service sorgen wir dafür, dass Ihre Maschinen stets im Gleichgewicht arbeiten. So sichern Sie dauerhaft maximale Leistung, Laufruhe und Produktionsqualität.
wir finden ihre lösungen
Unsere Produkte für Ihren Anwendungsfall
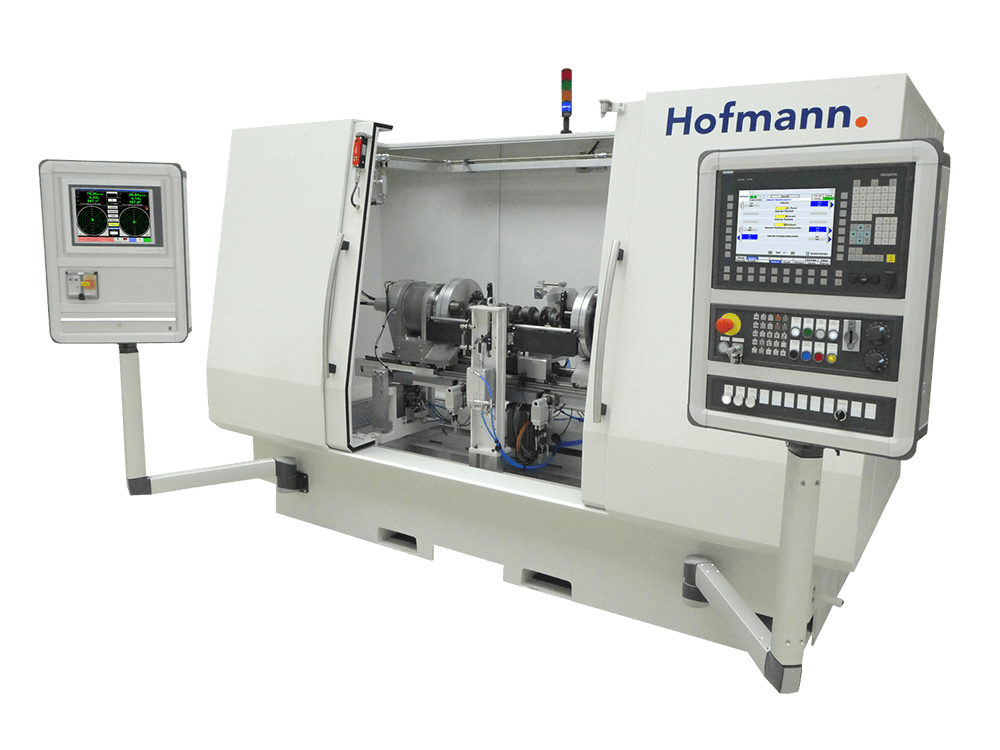
Auswuchtmaschinen
Reduzieren Sie Vibrationen und sorgen Sie für Laufruhe. Unsere Maschinen passen sich Ihren Anforderungen an und steigern die Effizienz.
Messtechnik
Erkennen Sie Unwuchten und Schwingungen frühzeitig. Unsere präzisen Messsysteme liefern verlässliche Daten für jede Anwendung.
Schleuderlösung
Präzises Schleudern für Rotoren und Komponenten bei allen Drehzahlen. Unsere Systeme garantieren Sicherheit, Laufruhe und optimale Performance.
Service
Fehlt das Know-how oder die Kapazität vor Ort? Wir übernehmen Lohnwuchten, Betriebsauswuchten und bieten individuelle Beratung.
News & Aktionen
Hofmann erreicht TISAX Zertifizierung
Trefft uns auf der EMO 2025 in Hannover!
Erweiterung der Akkreditierung unseres Prüfservice
Neue Partnerschaft: Kooperation mit deineMaschine
Neu in der Hofmann-Familie: Ibis GmbH
Seit Januar 2022 gehört die Ibis GmbH zur Hofmann-Gruppe. Der gemeinsame Firmensitz in Pfungstadt steht für kurze Wege, enge Zusammenarbeit […]
Service
Schulungsangebote
Unsere Seminare bringen Sie auf den neuesten Stand der Auswucht- und Schwingungstechnik. Lernen Sie praxisnah, Fehler zu vermeiden und Prozesse effizienter zu gestalten.
Downloads
Hier finden Sie technische Hilfen, Fachartikel und weiterführende Informationen zu unseren Produkten und Lösungen, jederzeit zum Nachlesen und Herunterladen.
Auswuchtservice
Wir übernehmen das Lohnwuchten oder das Betriebsauswuchten direkt bei Ihnen vor Ort. So sichern Sie die Laufruhe Ihrer Maschinen ohne eigenen Mehraufwand.
Zertifizierter Prüfservice
Profitieren Sie von unserer Expertise für akkreditierte Messungen und Prüfungen. Wir helfen Ihnen, Ihre Maschinen und Prozesse nach höchsten Standards zu zertifizieren.
Drei Experten. Ein Ziel.
Ein perfektes Team

Hofmann
Hofmann bringt jahrzehntelange Erfahrung in Auswuchttechnik, Messtechnik und Schleuderlösungen ein. Mit innovativen Maschinen und maßgeschneiderten Lösungen setzen wir Maßstäbe in Qualität und Präzision.
Ibis
Ibis ergänzt das Team mit Spezialwissen in Schwingungsmessung und Maschinenzustandsüberwachung. Durch modernste Technologien sichern wir zuverlässige Analysen und Messungen auf höchstem Niveau.
deineMaschine
deineMaschine liefert High-Speed-Schleuderstände und maßgeschneiderte Sondermaschinen für komplexe Fertigungsprozesse. Gemeinsam erweitern wir unser Portfolio und bieten Lösungen, die über Standardmaschinen hinausgehen.